Hand-manipulator cu mâinile lor: cum se face?
Vom analiza modul în care se realizează un braț manipulator.fa-o singur pe modele industriale. În primul rând, vor fi atinse întrebările generale, apoi caracteristicile tehnice ale rezultatului, detaliile și în final procesul de asamblare.
În general și general

Caracteristicile tehnice ale rezultatului
O probă va fi luată în considerare cu parametrii.lungimi / înălțimi / lățimi, respectiv 228/380/160 milimetri. Greutatea manipulatorului de mână, realizată manual, va fi de aproximativ 1 kilogram. Pentru a controla utilizarea unei telecomenzi cu fir. Durata de asamblare aproximativă cu experiența este de aproximativ 6-8 ore. Dacă nu, atunci poate dura zile, săptămâni și cu connivanŃă și luni, astfel încât să poată fi asamblat un braŃ manipulator. Cu mâinile tale și singur în astfel de cazuri merită să faci altceva decât pentru propriul tău interes. Pentru deplasarea componentelor folosite motoarele colectoare. Cu suficient efort, puteți face un dispozitiv care să se rotească la 360 de grade. De asemenea, pentru confortul muncii, în plus față de uneltele standard cum ar fi fierul de lipit și lipit, trebuie să stocați:
- Clește extinse.
- Clesti laterali de taiere.
- Șurubelniță Phillips.
- 4 baterii D.
Telecomanda poatepune în aplicare cu ajutorul butoanelor și un microcontroler. Dacă doriți să efectuați controlul wireless de la distanță, este necesar un element de control al acțiunilor în mână. Ca aditivi, vor fi necesare doar dispozitive (condensatoare, rezistoare, tranzistoare) care vor stabiliza circuitul și vor transfera curentul valorii necesare la momentul potrivit.
Detalii mici

De asemenea, trebuie să aveți grijă ca fireleNu complica mișcarea acesteia. Va fi ele traseul optim în cadrul structurii. Și se poate face totul în exterior, o astfel de abordare va economisi timp, dar ar putea duce la dificultăți în deplasarea unităților individuale sau întregul dispozitiv. Și acum: cum să faci o macara?
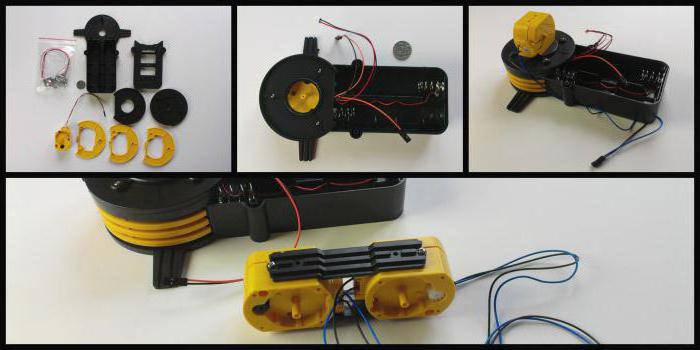
Adunarea în termeni generali

- Instalarea a două motoare. Fiecare dintre ei va fi responsabil pentru transformarea într-o anumită direcție. Când cineva lucrează, celălalt se odihnește.
- Instalarea unui motor cu un circuit care poate face rotirea în ambele direcții.
Care dintre opțiunile de a alege depindeexclusiv de la dvs. Următoarea este construcția principală. Pentru confortul lucrării sunt necesare două "îmbinări". Atașat la platformă ar trebui să poată să se aplece în direcții diferite, care este rezolvată cu ajutorul motoarelor plasate la baza sa. Unul sau mai multe perechi ar trebui plasate în locul cotului, astfel încât o parte a mânerului să poată fi deplasată de-a lungul liniilor orizontale și verticale ale sistemului de coordonate. Mai mult, dacă doriți să obțineți cât mai mult posibil, puteți instala un alt motor la încheietura mâinii. Mai mult, cel mai necesar, fără de care manipulatorul de mână nu apare. Mâinile vor trebui să facă singur dispozitivul de captare. Există multe opțiuni pentru implementare. Puteți oferi un sfat celor mai populare două:
- Numai două degete sunt folositesimultan strângeți și deconectați obiectul de captare. Este cea mai simplă implementare, care, de obicei, nu se poate lăuda cu o capacitate de transport semnificativă.
- Se creează un prototip al mâinii umane. Aici pentru toate degetele poate fi folosit un motor, cu ajutorul căruia se va efectua plierea / dezbracarea. Dar puteți face proiectarea mai dificilă. Deci, este posibil să vă conectați la fiecare deget al motorului și să îl controlați separat.
Apoi rămâne să faci telecomanda cu careva afecta motoarele individuale și ritmul muncii lor. Și puteți începe experimentele folosind un braț robotic realizat cu propriile mâini.
Posibilele imagini schematice ale rezultatului
Orice circuit manipulator prezentat poate fi îmbunătățit.
concluzie